{kind=link}
{kind=link}
Download from Bitbucket Project Source

Download platform specific binaries from:
 The Basilisk astrodynamics software architecture is being designed to be
capable of both faster-than realtime simulations, including repeatable
Monte-Carlo simulation options, as well as providing real-time options for
hardware-in-the-loop simulations. The Basilisk package is designed as a set of
Python modules written in C/C++ which allows for the ease of scripting and
reconfigurability of Python while still providing the execution speed of C/C++.
The software is being developed jointly by the University of Colorado
AVS Lab and the Laboratory for Atmospheric and
Space Physics (LASP). The resulting framework is targeted for both
astrodynamics research modeling the orbit and attitue of complex spacecraft systems, as well as sophisticated mission-specific vehicle
simulations that include hardware-in-the-loop scenarios.
The Basilisk astrodynamics software architecture is being designed to be
capable of both faster-than realtime simulations, including repeatable
Monte-Carlo simulation options, as well as providing real-time options for
hardware-in-the-loop simulations. The Basilisk package is designed as a set of
Python modules written in C/C++ which allows for the ease of scripting and
reconfigurability of Python while still providing the execution speed of C/C++.
The software is being developed jointly by the University of Colorado
AVS Lab and the Laboratory for Atmospheric and
Space Physics (LASP). The resulting framework is targeted for both
astrodynamics research modeling the orbit and attitue of complex spacecraft systems, as well as sophisticated mission-specific vehicle
simulations that include hardware-in-the-loop scenarios.
The name Basilisk was chosen to reflect both the reptilian (Python)
nature of the product-design as well as a nod to the speed requirements as the
South American common basilisk runs so fast that it can even run across water. The Basilisk framework is being designed from inception to support several different (often competing) requirements.
- Speed: Even though the system is operated through a Python interface, the underlying simulation executes entirely in C/C++ which allows for maximum execution speed. For example, a goal is to simulate a mission year with sufficiently accurate vehicle 6-DOF dynamics with at least a 365x speed-up (i.e. a year in a day).
- Reconfiguration: The user interface executes natively in Python which allows the user to change task-rates, model/algorithm parameters, and output options dynamically on the fly.
- Analysis: Python-standard analysis products like numpy and matplotlib are actively used to facilitate rapid and complex analysis of data obtained in a simulation run without having to stop and export to an external tool. This capability also applies to the Monte-Carlo engine available natively in the Basilisk framework.
- Hardware-in-the-Loop: Basilisk will provide synchronization to realtime via software-based clock tracking modules. This allows the package to synchronize itself to one or more timing frames in order to provide deterministic behavior in a realtime environment. External communication is handled via the Boost library with ethernet currently available and serial planned in the near future.
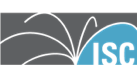
- Scriptability: The Python user interface to the C/C++ layer relies on the Simplified Wrapper and Interface Generator (SWIG) software, a cross-platform, open-source software tasked solely with interfacing C/C++ with scripting languages. This Python layer allows the simulation to be easily reconfigured which allows the user complete freedom in creating their own simulation modules and flight software (FSW) algorithm modules. Further, the Python layer abstracts logging/analysis which allows a single compilation of the source code to support completely different simulations.
- Controlled Data Flow: Simulation modules and FSW algorithm modules communicate through the message passing interface (MPI), which is a singleton pattern. The MPI allows data traceability and ease of test. Modules are limited in their ability to subscribe to messages and write messages, thus setting limitations on the flow of information and the power of modules to control data generation. The messaging system is also instrumented to track data exchange, allowing the user to visualize exactly what data movement occurred in a given simulation run.
- Cross-Platform Solution: Basilisk is inherently cross-platform in nature, and is supported on macOS, Windows, and Linux systems. The Python layer, C programming language, Boost communication library and Qt/Open-GL visualization are active cross-platform developments.
- Validation and Verification: Each simulation or FSW algorithm module has unit test that can be run automatically using py.test. Integrated scenario test validated coupled behavior between modules. Each dynamics modules has associated momentum, energy and power validation tests. This ensures the integrity of the valdiated modules as new simulation capabilities are added.
- Monte-Carlo Capability: The simulation framework is capable of doing bit-for-bit repeatable Monte-Carlo runs. The simulation parameters can be disturbed through a range of distribution functions.
- 3D Visualization: Basilisk has an accompanying stand-alone visualization called Vizard that uses the Unity gaming engine to visualize the spacecraft, its orientation and orbits, the local planets, and various qualitative data and indicators for sensors and actuators. Simulation events and device faults may be triggered directly from the visualization.
Basilisk Related Slides
Movies of Basilisk Visualization Software
Basilisk Related Publications
- J. Alcorn, H. Schaub, S. Piggott, “Attitude Control Performance Analysis Using Discretized Thruster With Residual Tracking,” AAS GN&C Conference, Breckenridge, Colorado, February 5–10, 2016.
- C. Allard, H. Schaub, and S. Piggott, “General Hinged Solar Panel Dynamics Approximating First-Order Spacecraft Flexing,” AAS GN&C Conference, Breckenridge, Colorado, February 5–10, 2016.
- P. Kenneally and H. Schaub, “High Geometric Fidelity Modeling Of Solar Radiation Pressure Using Graphics Processing Unit,” AAS Spaceflight Mechanics Meeting, Napa Valley, California, February 14–18, 2016. Paper No. 16-500.
- M. Cols Margenet, H. Schaub and S. Piggott, “Modular Attitude Guidance Development using the Basilisk Software Framework,” AIAA/AAS Astrodynamics Specialist Conference, Long Beach, California, September 12–15, 2016.
- J. Alcorn, C. Allard and H. Schaub, “Fully-Coupled Dynamical Modeling of a Rigid Spacecraft with Imbalanced Reaction Wheels,” AIAA/AAS Astrodynamics Specialist Conference, Long Beach, California, September 12–15, 2016.
- C. Allard, M. Diaz Ramos and H. Schaub, “Spacecraft Dynamics Integrating Hinged Solar Panels and Lumped-Mass Fuel Slosh Model,” AIAA/AAS Astrodynamics Specialist Conference, Long Beach, California, September 12–15, 2016.
- J. Alcorn, H. Schaub, S. Piggott and D. Kubitschek, “Simulating Attitude Actuation Options Using the Basilisk Astrodynamics Software Architecture,” 67th International Astronautical Congress, Guadalajara, Mexico, September 26–30, 2016.
- S. Piggott, J. Alcorn, M. Cols Margenet, P. Kenneally and H. Schaub, “Flight Software Development Through Python,” 2016 Workshop on Spacecraft Flight Software , JPL, California, Dec. 13–15 2016.
- P. Kenneally and H. Schaub, “Modeling Of Solar Radiation Pressure and Self-Shadowing Using Graphics Processing Unit,” AAS Guidance, Navigation and Control Conference, Breckenridge, Feb. 2–8, 2017.
- P. Panicucci, C. Allard and H. Schaub, “Spacecraft Dynamics Employing a General Multi-tank and Multi-thruster Mass Depletion Formulation,” AAS Guidance, Navigation and Control Conference, Breckenridge, Feb. 2–8, 2017.
- M. Cols Margenet, H. Schaub, and S. Piggott, “Modular Platform for Hardware-in-the-Loop Testing of Autonomous Flight Algorithms,” International Syposium on Space Flight Dynamics, Himegin Hall, Matsuyama-Ehime, Japan, June 3–9, 2017.
- J. Alcorn, C. Allard and H. Schaub, “Fully-Coupled Dynamical Jitter Modeling Of Variable-Speed Control Moment Gyroscopes,” AAS/AIAA Astrodynamics Specialist Conference, Stevenson, WA, August 20–24, 2017.
- C. Allard, M. Diaz Ramos, P. Kenneally, H. Schaub and S. Piggott, “Modular Software Architecture for Fully-Coupled Spacecraft Simulations,” AAS Guidance and Control Conference, Breckenridge, CO, February 2–7, 2018.
- T. Teil, H. Schaub and S. Piggott, “Comparing Coarse Sun Sensor Based Sequential Sun-Heading Filters,” AAS Guidance and Control Conference, Breckenridge, CO, February 2–7, 2018.
- J. Wood, M. Cols Margenet, P. Kenneally, H. Schaub and S. Piggott, “Flexible Basilisk Astrodynamics Visualization Software Using the Unity Rendering Engine,” AAS Guidance and Control Conference, Breckenridge, CO, February 2–7, 2018.
- M. Cols Margenet, P. Kenneally and H. Schaub, “Software Simulator for Heterogeneous Spacecraft and Mission Components,” AAS Guidance and Control Conference, Breckenridge, CO, February 2–7, 2018.
- P. Kenneally and H. Schaub, “Fast Spacecraft Solar Radiation Pressure Modeling By Ray-Tracing On Graphic Processing Unit,” AAS Guidance and Control Conference, Breckenridge, CO, February 2–7, 2018.
- C. Allard and H. Schaub, “Stability Analysis of Spacecraft with Flexible Solar Arrays Using Classical Techniques,” AAS Guidance and Control Conference, Breckenridge, CO, February 2–7, 2018.
- P. Kenneally, H. Schaub and S. Piggott, “Basilisk: A Flexible, Scalable and Modular Astrodynamics Simulation Framework,” 7th International Conference on Astrodynamics Tools and Techniques (ICATT), DLR Oberpfaffenhofen, Germany, November 6–9, 2018.